




Jam Digital Dengan IC 7493 – IC 7447 – IC NE (time) 555 ] Rangkaian jam terdiri dari berbagai rangkaian seperti rangkaian detik, menit dan jam. Rangkaian jam Terdiri dari IC 7493, IC 7447 dan IC clock yaitu IC NE 555.
IC 7493 adalah IC TTL yang dapat digunakan sebagai pembagi 16. secara sederhana, IC 7493dapat digambarkan ssebagai berikut :.

RO1 dan RO2 : Master reset Berfungsi untuk mereset keluaran
CLK A : Clock pertama Dihubungkan pada pulsa atau output pulsa IC sebelumnya
CLK B : Clock kedua Dihubungkan dengan QA
Q (A,B,C,D) : Keluaran
IC 7447 adalah IC TTL yang dapat digunakan sebagai penghubung antara IC counter dengan seven segmen . Secara sederhana, IC 7447 dapat digambarkan sebagai berikut :
A,B,C,D: Input dari dekoder O
( A,B,C,D,E,F,G ): Output dari dekoder
IC NE (time) 555 adalah IC yang digunakan sebagai pemicu jam tersebut untuk berdetak dan juga sebagai pengatur frekuensi sebesar 1 Hz .
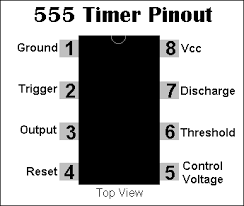
Berikut adalah keterangan tentang maksud dan fungsi – fungsi pada kaki ic time 555 :
PIN ke: KETERANGAN
1 Ground (0V), adalah pin input dari sumber tegangan DC paling negative
2 Trigger, input negative dari lower komparator (komparator B) yang menjaga osilasi tegangan terendah kapasitor pada 1/3 Vcc dan mengatur RS flip-flop
3 Output, pin keluaran dari IC 555.
4 Reset, adalah pin yang berfungsi untuk me reset latch didalam IC yang akan berpengaruh untuk me-reset kerja IC. Pin ini tersambung ke suatu gate (gerbang) transistor bertipe PNP, jadi transistor akan aktif jika diberi logika low. Biasanya pin ini langsung dihubungkan ke Vcc agar tidak terjadi reset
5 Control voltage, pin ini berfungsi untuk mengatur kestabilan tegangan referensi input negative (komparator A). pin ini bisa dibiarkan tergantung (diabaikan), tetapi untuk menjamin kestabilan referensi komparator A, biasanya dihubungkan dengan kapasitor berorde sekitar 10 nF ke pin ground
6 Threshold, pin ini terhubung ke input positif (komparator A) yang akan me-reset RS flip-flop ketika tegangan pada pin ini mulai melebihi 2/3 Vcc
7 Discharge, pin ini terhubung ke open collector transistor internal (Tr) yang emitternya terhubung ke ground. Switching transistor ini berfungsi untuk meng-clamp node yang sesuai ke ground pada timing tertentu
8 Vcc, pin ini untuk menerima supply DC voltage. Biasanya akan bekerja optimal jika diberi 5V s/d 15V. Supply arusnya dapat dilihat di datasheet, yaitu sekitar 10mA s/d 15mA.
1.Menerapkan Logika Rangkaian waktu detik ke menit
Detik terdiri dari satuan 0-9 dan puluhan 0-5. Pada saat puluhan di posisi 5 dan satuan di posisi 9 yang berarti detik ke 59,maka rangkaian detik ini akan mereset menjadi 0-0 dan akanmenambah 1 pada satuan menit .
Untuk memperoleh tampilan 0-9 pada satuan detik, maka IC 1(7493) diset sebagai pembagi 10. Karena pada kondisi normal, IC 7493 adalah pembagi 16,maka master reset dihubungkan dengan QB dan QD karena pada prinsipnya kita mereset angka10 supaya angka 10 tidak tampil pada layar display sementara itu angka 10 dalam biner adalah1010 dimana digit sebelah kiri adalah MSB(digit dengan nilai tertinggi).
di dalam mereset kita tidak menggunakan urutan dari MSB ke LSB(digit dengan nilai terendah) tetapi sebaliknya kitamenggunakan urutan dari LSB ke MSB jadi QA,QB,QC,QD untuk biner 10 berturut-turut adalah 0,1,0,1 QA dan QC bernilai 0 sementara itu QB dan QD bernilai 1.
Di dalam mereset kita menghubungkan digit yang bernilai 1 yang terdapat pada nilai biner yang akan direset denganmaster reset(RO1 dan RO2) maka dalam mereset angka 10 kita menghubungkan QB dengan
RO1 dan QD dengan RO2 atau bisa sebaliknya.
CLKA dihubungkan lagsung dengan output darirangkaian pembangkit clock yang menggunakan IC NE 555 dan CLKB dihubungkan dengan QAkarena pada dasarnya IC counter terdiri dari beberapa buah flip-flop yang saling berhubungandan untuk IC 7493 output dari flip-flop A misalnya,merupakan input dari flip-flop yanglain.
Untuk mengeset nilai puluhan,kita mereset angka 6 supaya angka 6 tidak ditampilkan padadisplay dan supaya tampilan pada display hanya merupakan nilai antara 1-5,maka output yangterakhir dari IC 1(rangkaian detik bagian satuan yang bernilai 1) dalam hal ini adalah QDdihubungkan ke CLKA pada IC 2(rangkaian detik bagian puluhan) sementara itu CLKBdihubungkan dengan QA pada IC 2 seperti yang telah dijelaskan di atas. RO1 dihubungkan keQB dan RO2 dihubungkan ke QC untuk mereset keluaran jika output sudah bernilai0110(merupakan biner dari 6). Lihat gambar :

2. Rangkaian Jam
Rangkaian jam terdiri dari puluhan jam yang berkisar antara nilai 0-2 dan mereset angka 3supaya angka 3 tidak ditampilkan pada layar,sementara itu untuk bagian satuan pada jamnilainya berkisar antara angka 0-9.
Pada rangkaian jam ini dibutuhkan untuk mereset angka 10dan 4 pada bagian puluhan jam oleh karena itu kita menggunakan dua (2) gerbang and dan satugerbang or.Tidak beda dengan rangkaian menit dan detik clock A pada rangkaian jam ini jugadihubungkan dengan QC dari rangkaian menit bagian puluhan.

Kesimpulan
Rangkaian detik pada jam digital merupakan rangkaian pembagi 60.
Rangkaian menit pada jam digital merupakan rangkaian pembagi 3600.
Rangkaian jam pada jam digital merupakan rangkaian pembagi 86400.
IC 7493 adalah IC TTL yang dapat digunakan sebagai pembagi 16. secara sederhana, IC 7493dapat digambarkan ssebagai berikut :.
RO1 dan RO2 : Master reset Berfungsi untuk mereset keluaran
CLK A : Clock pertama Dihubungkan pada pulsa atau output pulsa IC sebelumnya
CLK B : Clock kedua Dihubungkan dengan QA
Q (A,B,C,D) : Keluaran
IC 7447 adalah IC TTL yang dapat digunakan sebagai penghubung antara IC counter dengan seven segmen . Secara sederhana, IC 7447 dapat digambarkan sebagai berikut :
A,B,C,D: Input dari dekoder O
( A,B,C,D,E,F,G ): Output dari dekoder
IC NE (time) 555 adalah IC yang digunakan sebagai pemicu jam tersebut untuk berdetak dan juga sebagai pengatur frekuensi sebesar 1 Hz .
Berikut adalah keterangan tentang maksud dan fungsi – fungsi pada kaki ic time 555 :
PIN ke: KETERANGAN
1 Ground (0V), adalah pin input dari sumber tegangan DC paling negative
2 Trigger, input negative dari lower komparator (komparator B) yang menjaga osilasi tegangan terendah kapasitor pada 1/3 Vcc dan mengatur RS flip-flop
3 Output, pin keluaran dari IC 555.
4 Reset, adalah pin yang berfungsi untuk me reset latch didalam IC yang akan berpengaruh untuk me-reset kerja IC. Pin ini tersambung ke suatu gate (gerbang) transistor bertipe PNP, jadi transistor akan aktif jika diberi logika low. Biasanya pin ini langsung dihubungkan ke Vcc agar tidak terjadi reset
5 Control voltage, pin ini berfungsi untuk mengatur kestabilan tegangan referensi input negative (komparator A). pin ini bisa dibiarkan tergantung (diabaikan), tetapi untuk menjamin kestabilan referensi komparator A, biasanya dihubungkan dengan kapasitor berorde sekitar 10 nF ke pin ground
6 Threshold, pin ini terhubung ke input positif (komparator A) yang akan me-reset RS flip-flop ketika tegangan pada pin ini mulai melebihi 2/3 Vcc
7 Discharge, pin ini terhubung ke open collector transistor internal (Tr) yang emitternya terhubung ke ground. Switching transistor ini berfungsi untuk meng-clamp node yang sesuai ke ground pada timing tertentu
8 Vcc, pin ini untuk menerima supply DC voltage. Biasanya akan bekerja optimal jika diberi 5V s/d 15V. Supply arusnya dapat dilihat di datasheet, yaitu sekitar 10mA s/d 15mA.
1.Menerapkan Logika Rangkaian waktu detik ke menit
Detik terdiri dari satuan 0-9 dan puluhan 0-5. Pada saat puluhan di posisi 5 dan satuan di posisi 9 yang berarti detik ke 59,maka rangkaian detik ini akan mereset menjadi 0-0 dan akanmenambah 1 pada satuan menit .
Untuk memperoleh tampilan 0-9 pada satuan detik, maka IC 1(7493) diset sebagai pembagi 10. Karena pada kondisi normal, IC 7493 adalah pembagi 16,maka master reset dihubungkan dengan QB dan QD karena pada prinsipnya kita mereset angka10 supaya angka 10 tidak tampil pada layar display sementara itu angka 10 dalam biner adalah1010 dimana digit sebelah kiri adalah MSB(digit dengan nilai tertinggi).
di dalam mereset kita tidak menggunakan urutan dari MSB ke LSB(digit dengan nilai terendah) tetapi sebaliknya kitamenggunakan urutan dari LSB ke MSB jadi QA,QB,QC,QD untuk biner 10 berturut-turut adalah 0,1,0,1 QA dan QC bernilai 0 sementara itu QB dan QD bernilai 1.
Di dalam mereset kita menghubungkan digit yang bernilai 1 yang terdapat pada nilai biner yang akan direset denganmaster reset(RO1 dan RO2) maka dalam mereset angka 10 kita menghubungkan QB dengan
RO1 dan QD dengan RO2 atau bisa sebaliknya.
CLKA dihubungkan lagsung dengan output darirangkaian pembangkit clock yang menggunakan IC NE 555 dan CLKB dihubungkan dengan QAkarena pada dasarnya IC counter terdiri dari beberapa buah flip-flop yang saling berhubungandan untuk IC 7493 output dari flip-flop A misalnya,merupakan input dari flip-flop yanglain.
Untuk mengeset nilai puluhan,kita mereset angka 6 supaya angka 6 tidak ditampilkan padadisplay dan supaya tampilan pada display hanya merupakan nilai antara 1-5,maka output yangterakhir dari IC 1(rangkaian detik bagian satuan yang bernilai 1) dalam hal ini adalah QDdihubungkan ke CLKA pada IC 2(rangkaian detik bagian puluhan) sementara itu CLKBdihubungkan dengan QA pada IC 2 seperti yang telah dijelaskan di atas. RO1 dihubungkan keQB dan RO2 dihubungkan ke QC untuk mereset keluaran jika output sudah bernilai0110(merupakan biner dari 6). Lihat gambar :
2. Rangkaian Jam
Rangkaian jam terdiri dari puluhan jam yang berkisar antara nilai 0-2 dan mereset angka 3supaya angka 3 tidak ditampilkan pada layar,sementara itu untuk bagian satuan pada jamnilainya berkisar antara angka 0-9.
Pada rangkaian jam ini dibutuhkan untuk mereset angka 10dan 4 pada bagian puluhan jam oleh karena itu kita menggunakan dua (2) gerbang and dan satugerbang or.Tidak beda dengan rangkaian menit dan detik clock A pada rangkaian jam ini jugadihubungkan dengan QC dari rangkaian menit bagian puluhan.
Kesimpulan
Rangkaian detik pada jam digital merupakan rangkaian pembagi 60.
Rangkaian menit pada jam digital merupakan rangkaian pembagi 3600.
Rangkaian jam pada jam digital merupakan rangkaian pembagi 86400.




























